

zur Hauptseite, Abschnitt Projekte
Fembot : Roboter-Module
Field evaluation for modules - roboter : Fembot
Fembot soll ein hybrides Luftschiff für den Einsatz im Freien werden. Der Einsatz bei typischen Windverhältnissen in Ilmenau erfordert eine maximale Geschwindigkeit von 8m/s. Die Auslegung erfolgt für eine Nutzlast von 1,5kg±0,5kg und eine Missionsdauer von 30 Minuten bis 8 Stunden.
Fembot wird nicht nur zum Testen von Modulen im Verbund sondern auch als Kamera-Träger für Streaming oder iSTUFF.
Komponenten/Module
Zum Betrieb von Fembot werden wenigstens folgende Komponenten/Module benötigt:
- 1 Energie-Modul
- 1 Gateway-Modul
- 1 Notebook mit WLAN/Fernsteuerung
- 3 MPA-Module
- 3 Rotations/Neige-Module
- Hülle/Struktur
Antrieb
Der Antrieb erfolgt durch 3 MPA-Module. Um Agilität, Geschwindigkeit und mögliche Nutzlast zu maximieren, werden die MPA-Module an jeweils einem Rotations/Neige-Modul montiert. Es ergeben sich 9 Freiheitsgrade für die Antriebsregelung. Damit ist eine aktive unabhängige Regelung aller 6 Freiheitsgrade der Bewegung möglich.
Nutzlast und Auftrieb
Fembot wird immer mit etwas mehr Masse betrieben als durch statischen Auftrieb gehoben werden kann. Dadurch sinkt Fembot im Fehlerfall langsam zu Boden. Die Systemmasse von ca. 1,7kg und 1,0kg Nutzlast wird komplett vom statischen Auftrieb gehoben. Dafür ist ein Volumen von ca. 2,8m³ Traggas (Helium mit max. 20% H2) nötig. Bis zu 1kg zusätzliche Nutzlast wird vom dynamischen Auftrieb und/oder den Antrieben getragen.
Steuerung
Ein Notebook mit WLAN und/oder eine RC-Fernsteuerung (Backup) werden zum Steuern von Fembot verwendet. Die Übersetzung der Protokolle findet im Gateway-Modul statt.
Hülle/Struktur
- Volumen: 3,0m³
- Prallluftschiff (Blimp) mit leichter interner Struktur zur Krafteinleitung für Module
- Breite ca. 2,5m (±0,2m) [inkl. Leitwerk]
- Höhe ca. 1,0m (±0,1m) [inkl. Leitwerk]
- Länge ca. 4,0m (±0,1m) [inkl. MPA-Modul]
- Überdruck: ca. 270Pa (±150Pa)
- Überdruckventile und ein kleines Ballonett mit 0,4m³ (±0,2m³) Volumen zum Ausgleich
6 Modul-Schnittstellen
| Position | Verwendung |
|---|---|
| hinten | Antrieb (Rotations/Neige-Modul mit MPA-Modul) |
| links | Antrieb (Rotations/Neige-Modul mit MPA-Modul) |
| rechts | Antrieb (Rotations/Neige-Modul mit MPA-Modul) |
| unten, hinten | Gateway-Modul |
| unten, mittig | frei (Nutzlast) |
| unten, vorne | Energie-Modul |
| Seitenleitwerk | Steuerungs-Kamera |
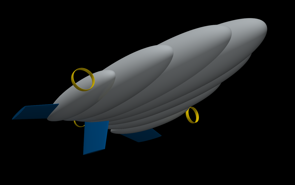
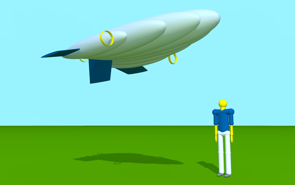
Visualisierung
zur Hauptseite, Abschnitt Projekte